
মাইক্রোকন্ট্রোল অ্যান্ড পিএলসি (80 টি প্রশ্ন )
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
এখানে প্রথম ৩০টি প্রশ্নের ব্যাখ্যা দেখতে পারবেন, বাকি সব প্রশ্নের সম্পূর্ণ ব্যাখ্যা পেতে এখনই অ্যাপ ইন্সটল করুন।Install App |
||
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
এখানে প্রথম ৩০টি প্রশ্নের ব্যাখ্যা দেখতে পারবেন, বাকি সব প্রশ্নের সম্পূর্ণ ব্যাখ্যা পেতে এখনই অ্যাপ ইন্সটল করুন।Install App |
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
|
|
||
|
||
এখানে প্রথম ৩০টি প্রশ্নের ব্যাখ্যা দেখতে পারবেন, বাকি সব প্রশ্নের সম্পূর্ণ ব্যাখ্যা পেতে এখনই অ্যাপ ইন্সটল করুন।Install App |
||
|
|
||
|
||
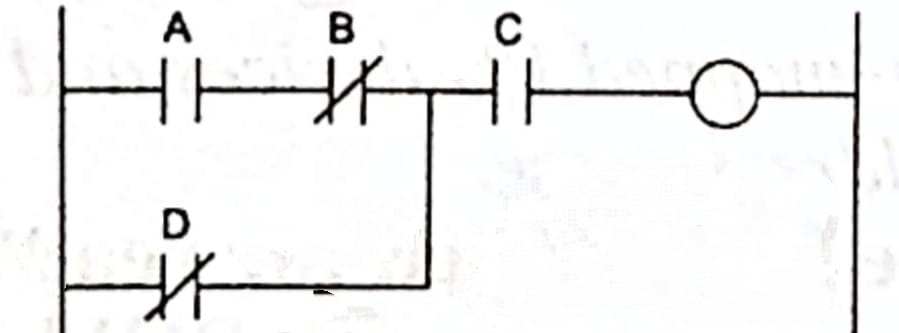
 এই প্রতীকটি নিচের কোনটির?
এই প্রতীকটি নিচের কোনটির? সঠিক উত্তর: 0 | ভুল উত্তর: 0